Le site est transféré sur Domotique pour la maison
Projet de domotique pour l'habitation

J'ai fait le choix de me lancer dans la construction de système de motorisation de mes volets battants à cause des motorisations actuelle qui tombent en panne les uns après les autres.
J'avais à l'origine opté pour des motorisations Voltec filaires fonctionnant en 230 V avec une commande local via des intérupteurs et une commande centrale de fermeture/ouverture de la marque Legrand fonctionnant en courant porteur.
Le problème est que le remplacement des moteurs de mes motorisations actuelles coûte la moitié d'un système neuf. Alors je me suis mis à la recherche d'un système fait maison et je suis tombé sur le site de Jacques mais visiblement son site est fermé.
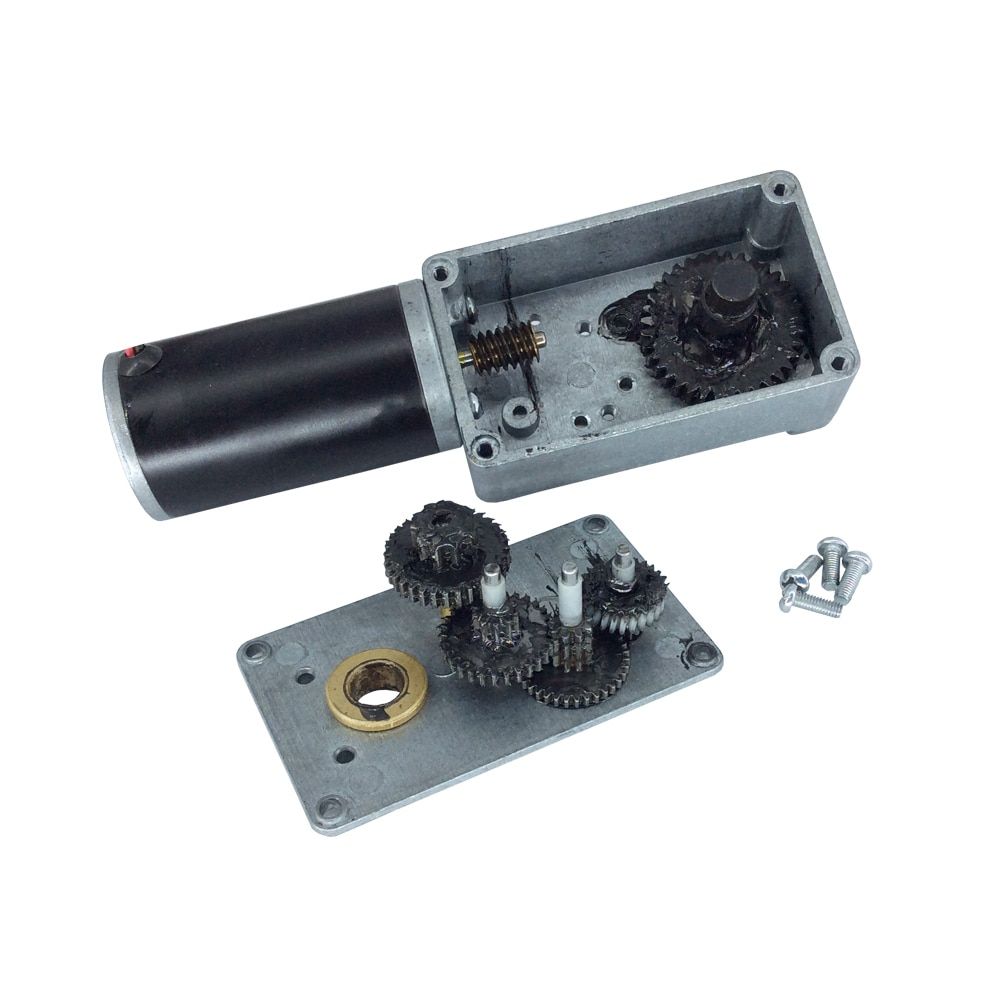
Je l'ai contacté est on sait mit à la recherche un moto-réducteur à vitesse lente qui pourrait convenir. Après de longue recherche bien pénible, on a choisi Ce moto-réducteur (Réf: TS-42GZ495-1622 - 3 rpm - 12V).
J'ai choisi Aliexpress pour le prix et en plus il est possible de trouver le moteur et le réducteur séparément. Le lien vers Aliexpresse pour commander le motoréducteur change souvent et peut indiquer que le produit n'est plus disponible.
C'est possible aussi de le commander sur le site du fabriquand Tsinymotor où via leurs adresses de contact Contact du fabriquant.
En dessous les photos de l'ensemble de pièces modélisé avec Fusion 360, en cliquant dessus vous pouvez voir les différentes pièces en plus gros.
Des mises à jour sont encore en cours, je suis en cours de rédaction de la partie mécanique et suivra la partie électronique car je travaille encore dessus.
Pour la responsivité du site, c'est fonctionnel sur les smartphones mais reste encore à voir pour les tablettes.
A la base, j'avais prévu d’utiliser un bus de donné pour la communication entre carte mais je me suis orienté sur le wifi et Bluetooth.














































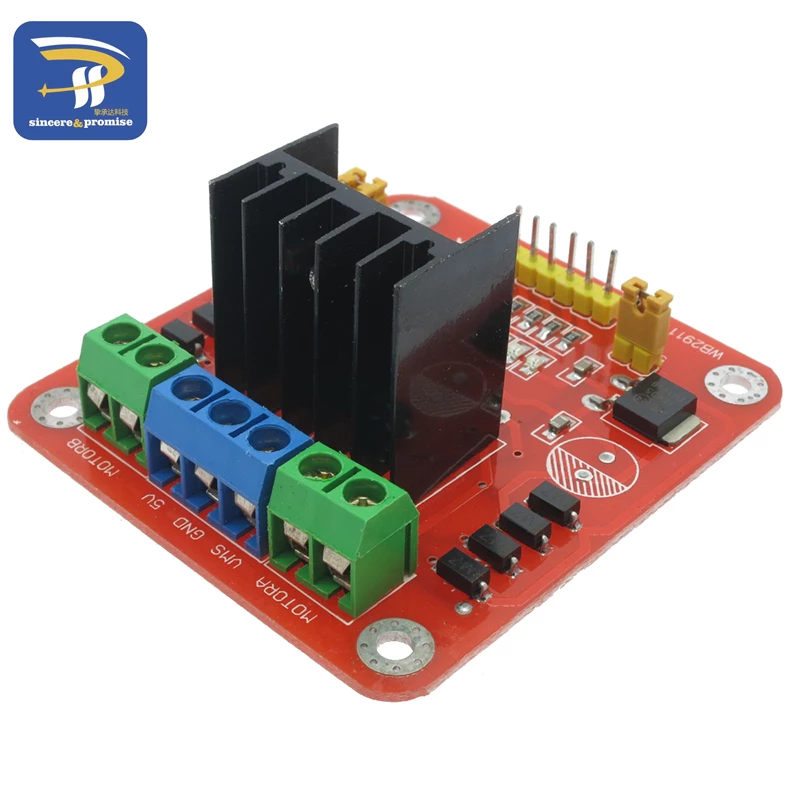
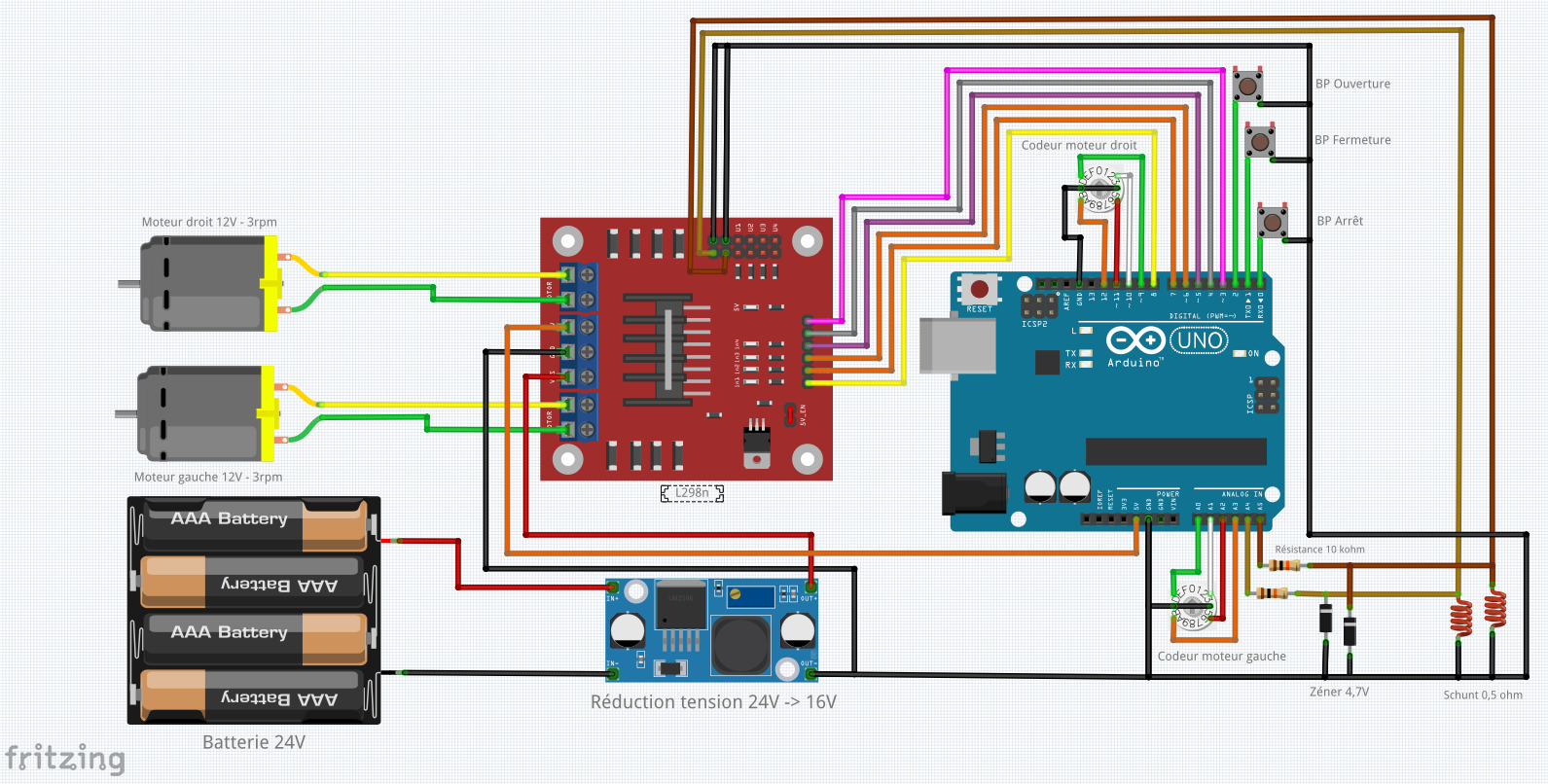
Voici les deux cartes électronique pour le pilotage des deux moteurs, de la commande manuel et le bus I2c
Je posséde deux portes de garage enroulable deux carde de commande et deux télécommande. Dans le cadre du projet de domotique de la maison, il me manque le wifi, une télécommande unique et dans commande manuel au même endroit.
Avec cette nouvelle carte, je vais ajouté un radar de stationnement pour les deux porte mais un seul sera installer.
Détail de équipement:
- L'ensemblement du projet ce fera en 9V via un module 230V/9V.
- Le pilotage des deux porte ce fera en 230V via 4 relais.
- Un voyant extéieur à LED en 6V avec NE555 pour le clignoitement.
- Les deux alimentation des radars de stationnement seront piloté via un transistor en 9V
- Un capteur de courant de type ACS712 - 5A sur chaque porte pour indiqué porte ouverte ou fermé et peut être une surcharge.
- La commande manuel ce fera via 4 bouton pousoir en façade du boitier
- Sur la carte sera ajouté des bouton pousoir CI en paralle bouton poussoir déporté avec LED d'indication.
- La commande via télécommande ce fera via un module RF 433 Mhz avec LED d'indication.
- Pour éviter le phénoméne de rebond sur les entrée (arduino/ESP32), je vais ajouté une résistance de tirage, un filtre RC et une bascule de Schmitt.
- Il sera prévu aussi un bouton poussoir d'arrêt d'urgent.
- La commande des relais, ce fera en 5V via optocoupleur, transistor, diode et LED d'indication.
- Le pilotage ce fera via un ESP32.
- Pour la programmation de la carte, le vais utilisé un port USB-C avec une puce CP2102.
- Les portes pourront être piloté via un page web en wifi et à therme via home asistant ou autre.
- Pour le stationnement, un radar de type HC-SR04, un LM2596 pour alimentation en 5V, un condo de découplage, un arduino nano et un anneau 24 LED RGB WS2812 5050.